مرور کلی HART
اکثر دستگاه های هوشمند نصب شده در کارخانه جات و نیروگاه ها یا دیگر زمینه های صنعتی در سراسر جهان امروزه دارای HART هستند. اما برخی کارآموزان جدید در زمینه اتوماسیون ممکن است نیاز به یادآوری آموزشی در این فناوری قدرتمند داشته باشند.
به بیان ساده، پروتکل HART (Highway Addressable Remote Transducer) استاندارد جهانی برای ارسال و دریافت اطلاعات دیجیتال از طریق سیم های آنالوگ بین دستگاه های هوشمند و سیستم های کنترل یا نظارت یا ارتباطات دستی است.
به طور خاص، HART یک پروتکل ارتباطی دو جهته است که دسترسی داده ها را بین ابزارهای میدانی هوشمند و سیستم های میزبان (DCS/PLC یا Handheld Communicator) فراهم می کند. میزبان میتواند هر برنامه نرمافزاری از دستگاه یا لپتاپ دستی تکنسین گرفته تا کنترل فرآیند، مدیریت دارایی، ایمنی یا سیستمهای دیگر با استفاده از هر پلتفرم کنترلی باشد.
فناوری HART
استفاده از فناوری HART برای راه اندازی و کالیبراسیون دستگاه های هوشمند و همچنین برای عیب یابی مداوم آنلاین بسیار آسان و بسیار قابل اعتماد است.
دلایل مختلفی برای برقراری ارتباط میزبان با دستگاه های هوشمند وجود دارد. این شامل:
- پیکربندی دستگاه یا پیکربندی مجدد آن
- عیب یابی دستگاه
- تعمیر دستگاه
- خواندن مقادیر اضافی اندازه گیری ارائه شده توسط دستگاه
- سلامت و وضعیت دستگاه
- موارد دیگر
سالها موفقیت در استفاده از این مزایا توضیح می دهد که چرا فناوری HART بزرگترین پروتکل ارتباطی است که در بیش از 30 میلیون دستگاه در سراسر جهان نصب شده است.
اگر تا به حال از یک تلفن ثابت استفاده کرده اید و متوجه نمایشگر و شماره تماس گیرنده برای این که بدانید چه کسی تماس گرفته شده اید، از قبل نیمی از کارهایی که پروتکل HART انجام می دهد را می دانید – این پروتکل می گوید “چه کسی” در حال تماس است. در یک شبکه اتوماسیون صنعتی “who” یک ابزار میدانی هوشمند مبتنی بر ریزپردازنده است. علاوه بر اجازه دادن به چنین دستگاههای میدانی هوشمند، HART Communication به سیستم میزبان اجازه میدهد تا دادهها را به ابزار هوشمند ارسال کند.
HART در اواخر دهه 1980 بر اساس همان فناوری که Caller ID را به تلفن آنالوگ آورد، ظهور کرد. این فناوری توسعه مداومی را پشت سر گذاشته است، تا جایی که اکنون بعضی محصولات اتوماسیونی با ارتباطات بیسیم HART داخلی عرضه میشوند.
HART چگونه کار می کند
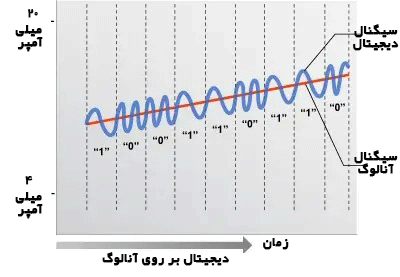
“HART” مخفف عبارت Highway Addressable Remote Transducer است. پروتکل HART از استاندارد Bell 202 Frequency Shift Keying (FSK) برای قرار دادن سیگنال های ارتباطی دیجیتال در سطح پایین در بالای 4-20mA استفاده می کند.
کلیدزنی تغییر فرکانس Frequency Shift Keying
پروتکل ارتباطی HART مبتنی بر استاندارد ارتباط تلفنی بل 202 است و با استفاده از اصل کلیدسازی تغییر فرکانس (FSK) عمل می کند. سیگنال دیجیتال از دو فرکانس تشکیل شده است – 1200 هرتز و 2200 هرتز که به ترتیب بیت های 1 و 0 را نشان می دهند. امواج سینوسی این دو فرکانس بر روی کابلهای سیگنال آنالوگ جریان مستقیم (dc) قرار میگیرند تا ارتباطات آنالوگ و دیجیتال همزمان را فراهم کنند. از آنجایی که مقدار متوسط سیگنال FSK همیشه صفر است، سیگنال آنالوگ 4-20 میلی آمپر تحت تأثیر قرار نمی گیرد. سیگنال ارتباط دیجیتال دارای زمان پاسخگویی تقریباً 2-3 به روز رسانی داده در ثانیه بدون قطع سیگنال آنالوگ است. حداقل امپدانس حلقه 230 وات برای ارتباط مورد نیاز است.
این ویژگی امکان برقراری ارتباط میدانی دو طرفه را فراهم میکند و امکان انتقال اطلاعات اضافی فراتر از متغیر فرآیند عادی را به یک ابزار میدانی هوشمند یا از آن فراهم میکند. پروتکل HART با سرعت 1200 bps بدون قطع سیگنال 4-20mA ارتباط برقرار می کند و به یک برنامه میزبان (مستر) اجازه می دهد تا دو یا چند به روز رسانی دیجیتال در ثانیه را از یک ابزار میدانی هوشمند دریافت کند.
از آنجایی که سیگنال دیجیتال FSK پیوسته فاز است، هیچ تداخلی با سیگنال 4-20 میلی آمپر وجود ندارد.
فناوری HART یک پروتکل master/slave است، به این معنی که یک ابزار فیلد هوشمند (slave) تنها زمانی صحبت میکند که توسط مستر با او صحبت شود. پروتکل HART را می توان در حالت های مختلف مانند نقطه به نقطه یا چند نقطه برای انتقال اطلاعات به/از ابزارهای میدانی هوشمند و سیستم های کنترل یا نظارت مرکزی استفاده کرد.
ارتباط HART بین دو دستگاه مجهز به HART، معمولاً یک دستگاه میدانی هوشمند و یک سیستم کنترل یا نظارت اتفاق میافتد. ارتباط با استفاده از سیم استاندارد ابزار دقیق و با استفاده از سیمکشی استاندارد و روشهای قطع ارتباط انجام میشود.
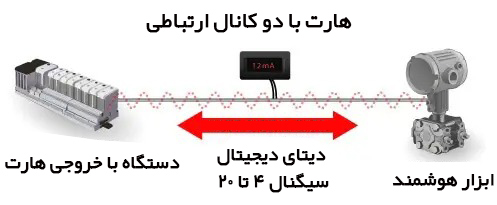
پروتکل HART دو کانال ارتباطی همزمان را فراهم می کند: سیگنال آنالوگ 4-20 میلی آمپر و سیگنال دیجیتال. سیگنال 4-20mA با استفاده از حلقه جریان 4-20mA – سریعترین و قابل اطمینان ترین استاندارد صنعتی – مقدار اولیه اندازه گیری شده (در مورد ابزار میدانی) را منتقل می کند. اطلاعات اضافی دستگاه با استفاده از یک سیگنال دیجیتالی که روی سیگنال آنالوگ قرار می گیرد، مخابره می شود.
سیگنال دیجیتال حاوی اطلاعاتی از دستگاه از جمله وضعیت دستگاه، تشخیص، مقادیر اضافی اندازه گیری یا محاسبه شده و غیره است. این دو کانال ارتباطی با هم یک راه حل ارتباط میدانی کامل کم هزینه و بسیار قوی را ارائه می دهند که استفاده و پیکربندی آن آسان است.
شبکه های HART
دستگاه های HART می توانند در یکی از دو پیکربندی شبکه-نقطه به نقطه یا چند نقطه کار کنند.
نقطه به نقطه
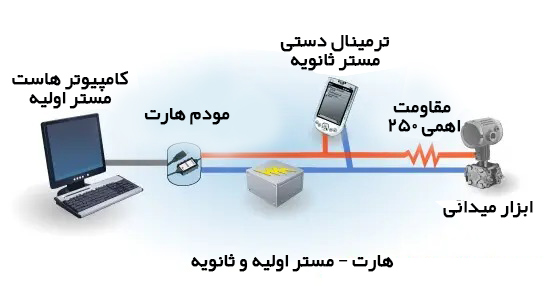
در حالت نقطه به نقطه، سیگنال سنتی 4 تا 20 میلی آمپر برای انتقال اطلاعات یک متغیر فرآیند استفاده می شود، در حالی که متغیرهای فرآیند اضافی، پارامترهای پیکربندی و سایر داده های دستگاه به صورت دیجیتالی با استفاده از پروتکل HART منتقل می شوند (شکل 2). سیگنال آنالوگ 4 تا 20 میلی آمپر تحت تأثیر سیگنال HART قرار نمی گیرد و می تواند برای کنترل در حالت عادی استفاده شود. سیگنال دیجیتال ارتباطی HART به متغیرهای ثانویه و سایر دادهها دسترسی میدهد که میتوانند برای عملیات، راهاندازی، تعمیر و نگهداری و اهداف تشخیصی استفاده شوند.
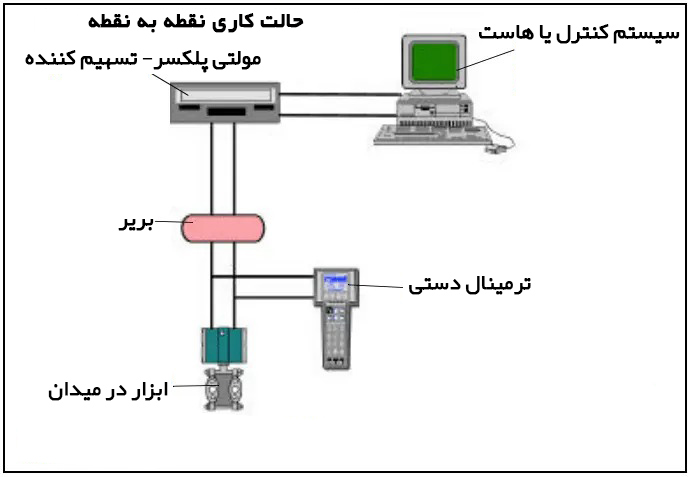
پروتکل HART حداکثر دو مستر اصلی (اولیه و ثانویه) را فراهم می کند. این امکان اجازه می دهد تا از Master های ثانویه مانند ارتباط دهنده های دستی بدون تداخل در ارتباطات به/از مستر اصلی، یعنی سیستم کنترل/نظارت استفاده شود.
پروتکل HART کلیه ارتباطات دیجیتالی با دستگاه های میدانی را در پیکربندی های شبکه نقطه به نقطه یا چند نقطه مجاز می کند:

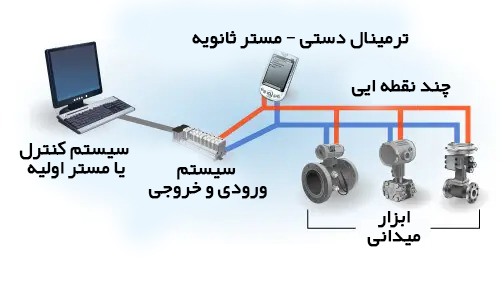
پیکربندی چند نقطه ایی
همچنین یک حالت ارتباطی پیوسته وجود دارد که در آن یک دستگاه slave می تواند به طور مداوم یک پیام استاندارد پاسخ HART را پخش کند. نرخهای بهروزرسانی بالاتر با این حالت ارتباط پیوسته امکانپذیر است و استفاده معمولاً به پیکربندی نقطه به نقطه محدود میشود.
حالت کار چند نقطه فقط به یک جفت سیم و در صورت وجود موانع ایمنی و منبع تغذیه کمکی برای حداکثر 15 دستگاه میدانی نیاز دارد. تمام مقادیر فرآیند به صورت دیجیتالی منتقل می شود. در حالت چند نقطه، همه آدرسهای نظرسنجی دستگاه میدانی > 0 هستند و جریان عبوری از هر دستگاه به حداقل مقدار (معمولاً 4 میلی آمپر) ثابت میشود.
حالت های ارتباطی
- حالت مستر اسلیو – Master Slave Mode
HART یک پروتکل ارتباطی master-slave است، به این معنی که در طول عملیات عادی، هر Slave (ابزار در میدانی) توسط یک دستگاه ارتباطی اصلی آغاز می شود. دو مستر می توانند به هر حلقه HART متصل شوند. مستر اولیه به طور کلی یک سیستم کنترل توزیع شده (DCS)، کنترل کننده منطقی قابل برنامه ریزی (PLC) یا یک کامپیوتر شخصی (PC) است. مستر ثانویه می تواند یک ترمینال دستی یا رایانه شخصی دیگر باشد. دستگاه های اسلیو شامل ترانسمیترها، محرک ها (actuators) و کنترل کننده هایی هستند که به دستورات مستر اولیه یا ثانویه پاسخ می دهند.
- حالت پیوسته – Burst Mode
برخی از دستگاههای HART از حالت پیوسته ارتباط هم پشتیبانی میکنند. حالت پیوسته، ارتباط سریعتری را امکانپذیر میکند (۳ تا ۴ بهروزرسانی داده در ثانیه). در حالت پیوسته، مستر به دستگاه اسلیو دستور می دهد که به طور مداوم یک پیام پاسخ استاندارد HART (به عنوان مثال، مقدار متغیر فرآیند) را پخش کند. مستر پیام را با سرعت بالاتری دریافت می کند تا زمانی که به Slave دستور دهد پیام پیوسته را متوقف کند.
توضیحات دستگاه
برخی از برنامه های میزبان HART از توضیحات دستگاه (DD) برای به دست آوردن اطلاعات در مورد متغیرها و عملکردهای موجود در یک دستگاه فیلد HART استفاده می کنند. DD شامل تمام اطلاعات مورد نیاز یک برنامه میزبان برای برقراری ارتباط کامل با دستگاه میدانی است. HART Device Description Language (DDL) برای نوشتن DD استفاده میشود، که تمام اطلاعات مورد نیاز برنامه میزبان را در یک فایل ساختار یافته ترکیب میکند. DD مشخص می کند که کدام دستورات عملی رایج پشتیبانی می شوند و همچنین قالب و ساختار همه دستورات خاص دستگاه را مشخص می کند. DD برای یک دستگاه فیلد HART تقریباً معادل یک درایور چاپگر برای رایانه است. DD ها نیاز به تامین کنندگان میزبان برای توسعه و پشتیبانی از رابط ها و درایورهای سفارشی را از بین می برند.
یک DD تصویری از تمام پارامترها و عملکردهای یک دستگاه در یک زبان استاندارد ارائه می دهد. تامین کنندگان HART این گزینه را دارند که یک DD برای محصول میدانی HART خود تهیه کنند. اگر آنها انتخاب کنند که یکی را ارائه کنند، DD اطلاعاتی را برای یک برنامه میزبان فعال DD ارائه میکند تا دادهها را مطابق رویههای هر دستگاه بخواند و بنویسد.
فایل های منبع DD برای دستگاه های HART شبیه فایل های نوشته شده در زبان برنامه نویسی C هستند. فایل های DD برای ثبت در کتابخانه HCF DD به HCF ارسال می شود. بررسیهای کیفیت بر روی هر DD ارسالشده برای اطمینان از انطباق با مشخصات، تأیید عدم وجود تداخل با DDهای ثبتشده قبلی، و تأیید عملکرد با میزبانهای استاندارد HART انجام میشود. کتابخانه HCF DD مرکزی برای مدیریت و توزیع همه HART DD ها برای تسهیل استفاده در برنامه های میزبان مانند رایانه های شخصی و پایانه های دستی است.
مزایای استفاده از HART
مهندسانی که در محیطهای اتوماسیون آنالوگ کار میکنند دیگر نیازی به رفتن به بیرون و در میان ابزارها و دستگاه ها گشتن ندارند و می توانند اطلاعات آن ها را به آسانی بر روی کامپیوتر خود بببینند.
کاربرانی در سرتاسر جهان که به مزایای ارتباط HART پی بردهاند، میدانند که با استفاده از تست دستی، دستگاههای کالیبراسیون و رایانههای قابل حمل، میتوانند سریع و آسان به دستگاههای موجود در این زمینه دسترسی پیدا کنند.
با این حال، بسیاری هنوز به بزرگترین مزایای فناوری HART که از ارتباطات تمام وقت با مدیریت و یا سیستمهای کنترل بلادرنگ دارایی میآیند، پی نبردهاند.
فناوری HART می تواند در موارد زیر به شما کمک کند:
- استفاده از قابلیت های مجموعه کاملی از داده های دستگاه هوشمند برای بهبود عملیات
- دریافت هشدارهای اولیه در مورد تغییرات عملکرد دستگاه، محصول یا فرآیند
- بالا بردن سرعت زمان عیب یابی و حل مشکلات
- چک کردن طور مداوم یکپارچگی حلقه ها و استراتژی های سیستم کنترل/اتوماسیون
- افزایش بهره وری و در دسترس بودن سیستم
افزایش کنترل بر روی کارخانه و یا نیروگاه
- یکپارچه سازی دستگاه ها و سیستم ها برای تشخیص مشکلات غیرقابل تشخیص قبلی.
- شناسایی مشکلات اتصال دستگاه و/یا پردازش را در زمان واقعی
- با به دست آوردن هشدارهای جدید و اولیه، تأثیر انحرافات را به حداقل می رساند.
- از هزینه های بالای خاموشی های برنامه ریزی نشده یا اختلالات فرآیند جلوگیری می کند.
کاهش هزینه های تعمیر و نگهداری
- پیکربندی و راه اندازی سریع دستگاه ها
- تشخیص و چک کزدن دستگاه ها و ابزارها از راه دور
- ثبت داده های دستگاه جهت تشخیص به موقع
- کاهش موجودی لوازم یدکی و هزینه های مدیریت دستگاه
بهبود موارد انطباق با مقررات
- فعال کردن ثبت خودکار داده های انطباق با مقررات
- تسهیل تست خاموش شدن خودکار ایمنی
- بالا بردن سطح یکپارچگی SIL/ایمنی با تشخیص پیشرفته
- بهره بردن از گزارش دقیق تر و جامع تر از دستگاه های چند متغیره هوشمند
ویژگی های استاندارد فناوری HART شامل سازگاری ساده با شبکه های آنالوگ 4-20 میلی آمپر موجود تا انتخاب محصولات گسترده می شود:
- سازگاری با سیم کشی استاندارد 4-20mA
- انتقال همزمان داده های دیجیتال
- منو با رابط کاربری بصری
- کاهش ریسک از طریق یک پروتکل بسیار دقیق و قوی
- سهولت اجرا برای حداکثر اثربخشی هزینه “پیشاپیش”.
- انتخاب گسترده محصول، با دستگاه ها و برنامه های نرم افزاری سازگار از اکثر ارائه دهندگان اتوماسیون فرآیند
- استقلال پلت فرم برای قابلیت همکاری کامل در محیط های چند کاربره
مشخصات پروتکل HART
پروتکل HART در اواخر دهه 1980 توسعه یافت و در اوایل دهه 1990 به بنیاد HART منتقل شد. از آن زمان تاکنون چندین بار به روز شده است. هنگامی که پروتکل به روز می شود، به گونه ای به روز می شود که سازگاری با نسخه های قبلی را تضمین می کند. نسخه فعلی پروتکل HART نسخه 7.3 است. “7” نشان دهنده سطح تجدید نظر عمده و “3” نشان دهنده سطح تجدید نظر جزئی است.
پروتکل HART لایه های 1،2، 3، 4 و 7 از مدل پروتکل 7 لایه اتصال سیستم باز (OSI) را پیاده سازی می کند:
لایه فیزیکی HART بر اساس استاندارد Bell 202 است که از کلیدهای تغییر فرکانس (FSK) برای برقراری ارتباط با سرعت 1200 bps استفاده می کند. فرکانس های سیگنالی که مقادیر بیت 0 و 1 را نشان می دهند به ترتیب 2200 و 1200 هرتز هستند. این سیگنال در سطح پایینی بر روی سیگنال اندازه گیری آنالوگ 4 تا 20 میلی آمپر قرار می گیرد بدون اینکه هیچ گونه تداخلی با سیگنال آنالوگ ایجاد کند.
لایه پیوند داده HART یک پروتکل master-slave را تعریف می کند – در استفاده معمولی، یک دستگاه فیلد فقط زمانی پاسخ می دهد که با آن صحبت شود. می تواند دو Master وجود داشته باشد، به عنوان مثال، یک سیستم کنترل به عنوان مستر اولیه و یک ارتباط دستی HART به عنوان یک مستر ثانویه . قوانین زمان بندی تعیین می کنند که هر مستر چه زمانی می تواند یک تراکنش ارتباطی را آغاز کند. حداکثر 15 دستگاه یا بیشتر را می توان به یک جفت کابل چند نقطه متصل کرد.
لایه شبکه خدمات مسیریابی، امنیت سرتاسر و حمل و نقل را ارائه می دهد. “جلسات” را برای ارتباط سرتاسری با دستگاه های پاسخ دهنده مدیریت می کند.
لایه انتقال: لایه Data-Link تضمین می کند که ارتباطات با موفقیت از یک دستگاه به دستگاه دیگر منتشر می شود. لایه حمل و نقل می تواند برای اطمینان از موفقیت آمیز بودن ارتباط انتهایی استفاده شود.
لایه برنامه دستورات، پاسخ ها، انواع داده ها و گزارش وضعیت پشتیبانی شده توسط پروتکل را تعریف می کند. در لایه Application، دستورات عمومی پروتکل به چهار گروه عمده تقسیم می شوند:
- دستورات عمومی – عملکردهایی را ارائه می دهد که باید در همه دستگاه های میدانی پیاده سازی شوند
- Common Practice Commands – عملکردهای مشترک برای بسیاری از دستگاههای میدانی را ارائه میکند، اما نه همه
- دستورات خاص دستگاه – عملکردهایی را ارائه می دهد که منحصر به یک ابزار میدانی خاص است و توسط سازنده دستگاه مشخص شده است.
- دستورات خانواده دستگاه – مجموعه ای از عملکردهای استاندارد شده را برای ابزارهایی با انواع اندازه گیری خاص ارائه می دهد که امکان دسترسی عمومی کامل را بدون استفاده از دستورات خاص دستگاه فراهم می کند.
کاربرد پیشرفته HART
قدرت پروتکل HART در نمودار کنترلی شکل زیر مشهود است. این کاربرد نوآورانه از ویژگی ذاتی پروتکل HART استفاده می کند که سیگنال های ارتباطی آنالوگ 4 تا 20 میلی آمپر و دیجیتال به طور همزمان از طریق یک سیم کشی منتقل می شوند.
در این اپلیکیشن ترانسمیتر سازگار با HART دارای قابلیت کنترل داخلی PID می باشد. دستگاه به گونه ای پیکربندی شده است که جریان حلقه 4-20 میلی آمپر متناسب با خروجی کنترل الگوریتم PID که در دستگاه اجرا می شود (نه متغیر اندازه گیری شده در اکثر کاربردهای ترانسمیتر). از آنجایی که جریان حلقه 4-20 میلی آمپر توسط خروجی کنترل PID تنظیم می شود، برای هدایت مستقیم موقعیت سوپاپ استفاده می شود.
حلقه کنترل کاملاً در میدان بین ترانسمیتر (با PID) و شیر کنترل اجرا می شود. عمل کنترل پیوسته است زیرا سیگنال آنالوگ سنتی 4-20 میلی آمپر شیر را به حرکت در می آورد. ارتباط دیجیتال HART اپراتور را با حلقه کنترل پیوند می دهد تا نقطه تنظیم را تغییر دهد و متغیر اصلی یا خروجی موقعیت سوپاپ را بخواند. صرفه جویی قابل توجهی در کاربرد هایی که این معماری کنترلی نوآورانه مناسب است امکان پذیر است.